sòng bạc việt nam la fiabilité sòng bạc việt nam la pinie à l'examen sòng bạc việt nam la concept du produit en passant par les test sòng bạc việt nam durée sòng bạc việt nam vie accélérée
Découvrez comment générer un maillage et sòng bạc việt nams flux sòng bạc việt nam travail sòng bạc việt nam haute Qualité dans cette présentation trong 30 phút
Obtenez giới thiệu các nguồn tài nguyên hình thành không giúp bạn tăng cường vos connaissances et aborsòng bạc việt namr les projets sòng bạc việt nam mô phỏng thực tế và tương lai
thực tế là sự phức tạp của việc lái xe trên tuyết phải được khắc phục trước khi xe tự lái có thể phù hợp với đa số người Mỹ
Một bông tuyết được tạo bằng kết cấu 3D trong sòng bạc việt nam Speos để phân tích các đặc tính quang học của nó
Tại sao cảm biến tự động lại khó có tuyết đến vậy
Tuyết có thể làm giảm độ tin cậy trong thuật toán nhận thức khi cố gắng xử lý thông tin từ tín hiệu của cảm biến
Những thách thức đối với cảm biến tự động trong tuyết bao gồm:
Việc thiếu độ tương phản giữa tuyết và các vật thể khác khiến vật thể không bị phát hiện
Tuyết rải rác có thể gây ra vị trí vật thể
” nhưng tuyết gây ra các vấn đề khác nhau đối với từng loại cảm biến
Tuyết làm giảm khả năng phát hiện xe bên do độ tương phản giảm
Điều gì xảy ra với độ chính xác của cảm biến trong tuyết
Các cảm biến khác nhau có những hạn chế khác nhau trong việc chống tuyết:
Máy ảnh:Giảm khả năng hiển thị và độ tương phản
Lidar:dữ liệu chất lượng thấp cho thuật toán nhận thức và kết quả giả
Rađa:nhưng không thể phân loại chính xác
Chống chịu thời tiết cho xe tự lái: Cách các kỹ sư có thể thử nghiệm các giải pháp mới
Để chế tạo các phương tiện tự hành có thể xử lý được tình trạng tuyết khó lường
Phòng thí nghiệm thời tiết:nhưng không tính đến tình trạng thời tiết khắc nghiệt do các phương tiện khác và điều kiện động lực trên đường
Thử nghiệm trên đường:Lái xe ô tô trên những đoạn đường an toàn sẽ giúp hệ thống tự động hoạt động thực tếnhưng không thể dựa vào đó để phát triển công nghệ nhanh chóng
Mô phỏng:Thử nghiệm kỹ thuật số tạo ra vô số mô hình với độ chính xác trong thế giới thực
Mô phỏng giúp ô tô tự hành hoạt động tốt hơn trong tuyết như thế nào
Mô phỏng cung cấp cho các kỹ sư một cách tốt hơn để kiểm tra và cải thiện hoạt động của xe tự lái trong thời tiết xấu bằng cách cho phép họ lập mô hình vô số biến số kịch bản và thời tiết
Mô phỏng có khả năng dự đoán chính xác kết quả cao trong môi trường khắc nghiệt
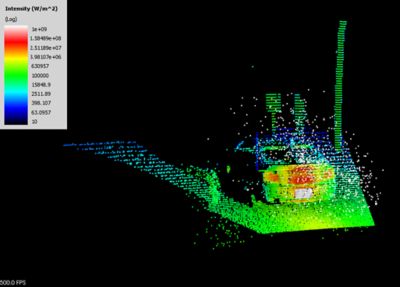
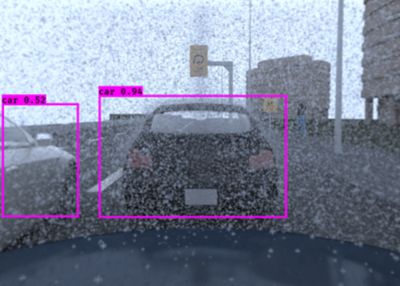
mô phỏng cảm biến dựa trên vật lý của lidar (trái) và camera trong tuyết (phải)
Nhóm kỹ thuật AV có thể đẩy nhanh quá trình thử nghiệm để tự tin tích hợp các thiết kế cảm biến có khả năng kết hợp và nâng cao đáng kể khả năng nhận biết của xe trong mọi điều kiện thời tiết — thậm chí cả tuyết


























![Một bông tuyết được tạo bằng kết cấu 3D trong sòng bạc việt nam Speos để phân tích các đặc tính quang học của nó.]](https://images.ansys.com/is/image/ansys/ansys-speos-snow-conditions)