激光雷达 () , , , , 3d 数据 ,
20 世纪初, ((无线电探测与测距 和声纳 (声音导航与测距 被用于测量距离 被用于测量距离 被用于测量距离 前者使用电磁无线电波 ,, , ,随着激光器在 20 世纪 60 年代问世 ,
| 雷达 | 声纳 | 激光雷达 |
传感方法 | 电磁无线电波 | 声波 | 电磁光波 |
常见应用 | 空中交通管制、天气预报 | 海上导航、水下绘图、考古 | 自动驾驶汽车、地面绘图、机器人 |
优势 |
|
|
|
弱点 |
|
|
|
所有激光雷达系统都由三个主要部分组成 : , ,光波可以击中物体、反弹回来 , , ,
激光发射
发射器以 186.000 英里/秒的速度在空气中发射短脉冲激光
光探测
当激光脉冲击中物体时 ,
数据处理
, , , 3D
通过快速使用多个激光发射器和脉冲光 (, , 3d和移动的精确信息。
, , , 其应用包括 :
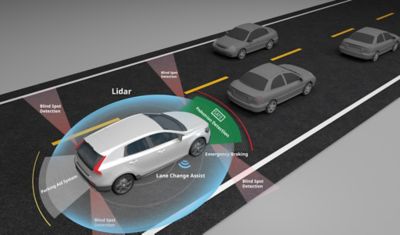
自动驾驶
, , 3d , , , ,
计算机视觉
, , , ,识别和解释视觉世界。激光雷达辅助的计算机视觉通常用于增强现实、手势识别 (游戏 和医疗监控。
面部识别
, , ,区分真实面部和 2d 图像。由于激光雷达使用自己的光源 因此它可以在弱光条件下 (甚至在黑暗条件下 绘制面部图。
机器人
, , 3d 地图可为机器人提供所需的精确数据 , (如仓库和工厂) ,
大多数人最开始都是通过自动驾驶了解到了激光雷达。而该技术的终极目标是实现 l5 级自动驾驶 即在任何场景中 , , , ,的传感器协同工作 , , , , 可以清晰地探测到 200 米以外的物体 ,
, , , 虽然当前大多数的激光雷达系统都使用飞行时间 TOF) ,调频连续波 (FMCW)
, , , , 。
下面是一些用于描述激光雷达系统的常见术语的定义 :
, , , , 。
激光雷达的优势 | 激光雷达的挑战 |
卓越的精度 | 成本高 |
, 。
, , , 如 ANSYSSpeos、Lumerical、Zemax和Cảm biến AVxcelerate, , , , , ,
值得关注的激光雷达趋势 :
, , , ,的许多重大发展指日可待。

























