ためには、適切なセンサーの組み合わせを選択することがさらに重要になります。
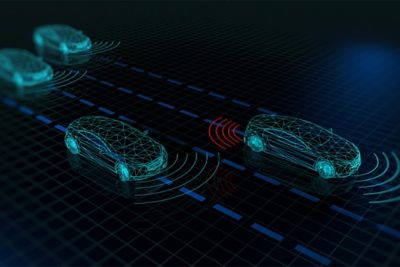
最高レベルの安全性と性能を実現するために、カメラ、レーダー、 Top 10 sòng bạc online 。たとえば、 Top 10 sòng bạc online だけでは車線追跡の結果は悪くなりますが、 Top 10 sòng bạc online
適切な組み合わせは、いくつかの要因によって異なります。
- センサーに求める機能は何か例: 緊急ブレーキ、衝突回避、駐車支援
- この機能の要件は何か例: 100m の距離で車両を検出する必要がある
- この機能で遭遇する可能性のあるエッジケースはどれか例: 霧などの悪天候
- 求めている機能は運転支援向けか、または自動化向けか
- 最も手頃な価格で提供できるのはどのセンサーセットか
- センサーの必要数が設計全体にどのような影響を与えるか
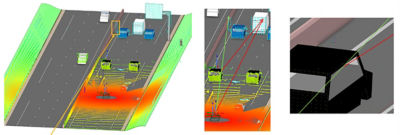
プロトタイプ車両が実際の環境に対応できるようにするためには、非常に多様なテストケースでセンサーを設計する必要があります。
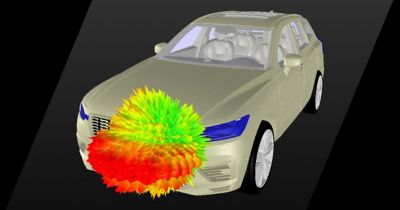
Top 10 sòng bạc online のシミュレーションプラットフォームは、カメラ、 Lidarに必要なすべての情報を入手できます。
設計探索の開始時に Top 10 sòng bạc onlineの組み合わせを評価できます。
物理ベースのセンサーシミュレーションを使用して自動運転車の安全性を向上させる方法の詳細については、オンデマンドウェビナーLàm cho phương tiện tự hành trở nên an Chơiをご覧ください。